

研究意义
复杂网络的研究已经发展了二十余年,目前正处于从二元相互作用的普通网络迈向多元作用的高阶网络的转型期。网络的同步控制是指通过添加控制器,使网络中的个体最终达到一种共同状态的群体行为。通过控制所有单纯形使高阶网络(单纯复形)达到同步的代价很大,如果只需控制一部分单纯形就能使网络达到同步,将有重要的实际意义。由于高阶网络中的交互关系比较复杂,其牵制控制相关文献目前还几乎是空白。
本文工作
为了解决上述问题,本文研究了如何设计自适应控制器使高阶网络达到同步,以及如何选取合适的单纯形进行牵制。具体而言,首先通过改变单纯形的耦合强度,给出高阶网络同步的自适应牵制控制律;然后根据扰动理论对网络Laplacian矩阵次小特征值进行研究,提出一个牵制单纯形选择的标准;最后将牵制单纯形后网络的同步速度与单纯形选择的结果进行对比,发现结果一致,说明了提出方法的有效性。
本文的创新点如下:
(1) 若内联耦合矩阵是单位矩阵,高阶网络广义Laplacian矩阵的次小特征值将直接影响网络同步。
(2) 改变给定单纯形的耦合大小来牵制单纯形,能使网络达到同步。
(3) 提出与次小特征值(不唯一)对应的正交单位特征向量构成的矩阵及扰动矩阵都有关的近似标准来选择牵制的单纯形。
实验结果
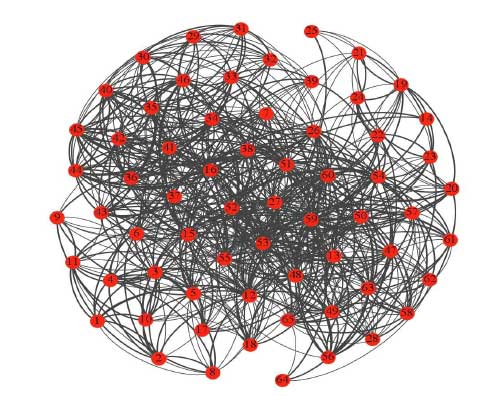
以图1所示的一个无向、加权的脑网络为例验证理论分析。该网络由65个节点(0-阶单纯形),730条无向边(1-阶单纯形),和3613个三角形(2-阶单纯形)组成。从该网络中随机地选出12个 D^(2_r)(2-阶单纯形及其对应的1-阶单纯形),计算它们的近似标准 Δ_(d_p^ε)^s ,结果如表1所示,其中{6,14,15}指2-阶单纯形[6,14,15]及其对应的1-阶单纯形[6,14],[6,15],[14,15]的集合,其它的类似。

由表1中 D^(2_r) 的近似标准 Δ_(d_p^ε)^s 可知,牵制{6,14,15}、{63,64,65}和{1,2,6}的顺序依次递减。
接下来,通过牵制控制这3个 D^(2_r) 来验证近似标准 Δ_(d_p^ε)^s 的合理性。
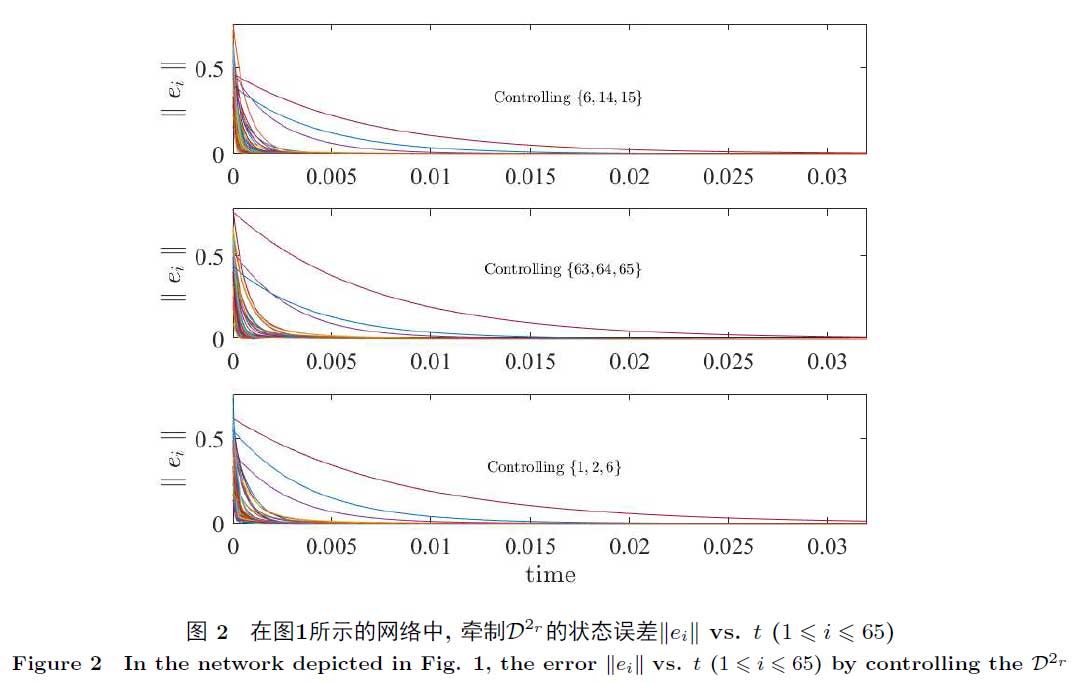
以Lorenz系统作为单个节点做仿真,其结果如图2所示。由图2可知,牵制{6,14,15}对应的网络中的节点 的状态误差曲线趋于零的速度最快,此时网络同步的速度最快,对应的单纯形最应该被控制;其次是{63,64,65};最次是{1,2,6}。由牵制控制的仿真结果可知{6,14,15}、{63,64,65}和{1,2,6}对应的单纯形被牵制的顺序依次递减,这与表1中的理论结果是一致的。因此,本文提出的牵制单纯形的选择标准 Δ_(d_p^ε)^s 是合理的。
全文下载
周进, 李博, 陆君安, 史定华. 高阶网络牵制控制中单纯形的选择. 中国科学: 信息科学, doi: 10.1360/SSI-2023-0142

http://engine.scichina.com/doi/10.1360/SSI-2023-0142
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。