

研究意义
分布式最优一致性问题作为协同控制研究的基础,吸引了研究者的广泛关注,并且取得了丰富的理论结果。值得注意的是,大多数研究结果都要求系统中所有智能体连续通信,而在资源有限的微处理器与带宽有限的网络情形下,连续通信难以实现。与此同时,智能体之间的通信拓扑可能随着时间的推移而发生很大的变化,比如通信拓扑的变化信号遵循马尔可夫切换序列。
本文工作
为解决上述问题,本文提出了两种全分布式事件触发控制方案,即同步和异步通信,以解决具有马尔可夫切换拓扑的线性多智能体系统的最优一致性问题。具体而言,分别为每个智能体设计了两种新的复合动态事件触发机制 (使用所有邻居信息或使用其中一个邻居的信息),在此基础上设计两种完全分布式的事件触发最优一致性协议,以达成共识并最小化全局凸组合性能函数。
本文的创新点如下:
(1) 对于具有马尔可夫切换拓扑和有限通信资源的大规模多智能体系统,提出了一种新的异步事件触发通信方案来解决最优一致性问题。
(2) 据作者所知,本文首次设计了异步事件触发控制方案来处理最优一致性问题。与同步通信方案相比,异步通信方案可以进一步减少通信堵塞。
(3) 所提出的方法更通用,与传统的触发机制相比,动态触发机制可以进一步降低通信频率。本文提出的方法不依赖于固定连通通信拓扑,通过设计新的自适应学习率,具有扩展性。
实验结果
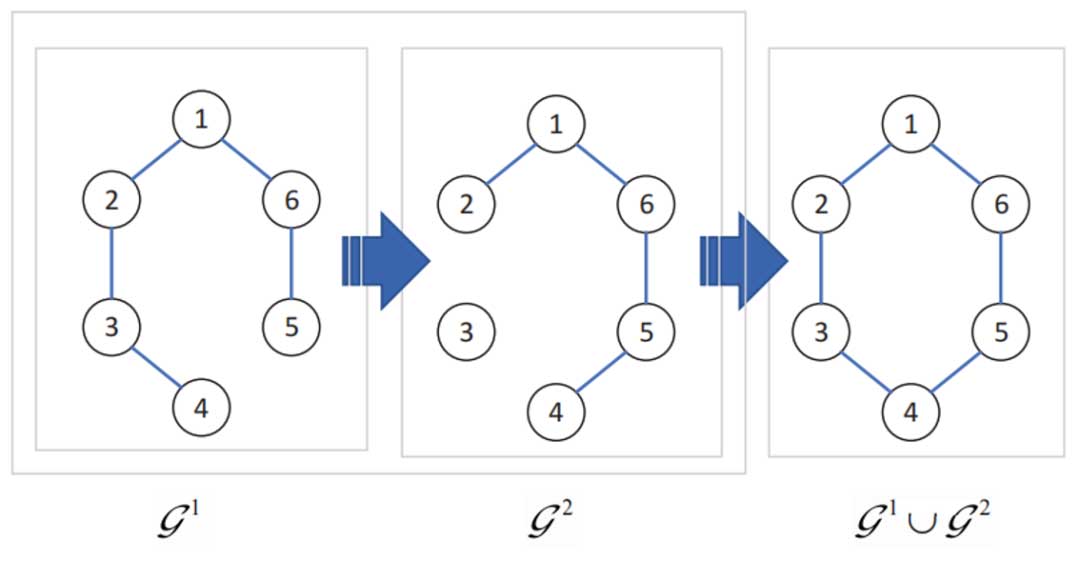
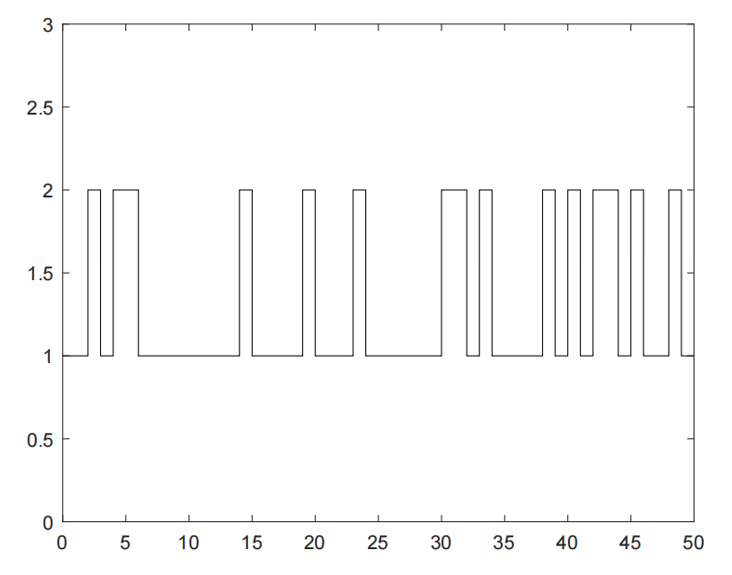
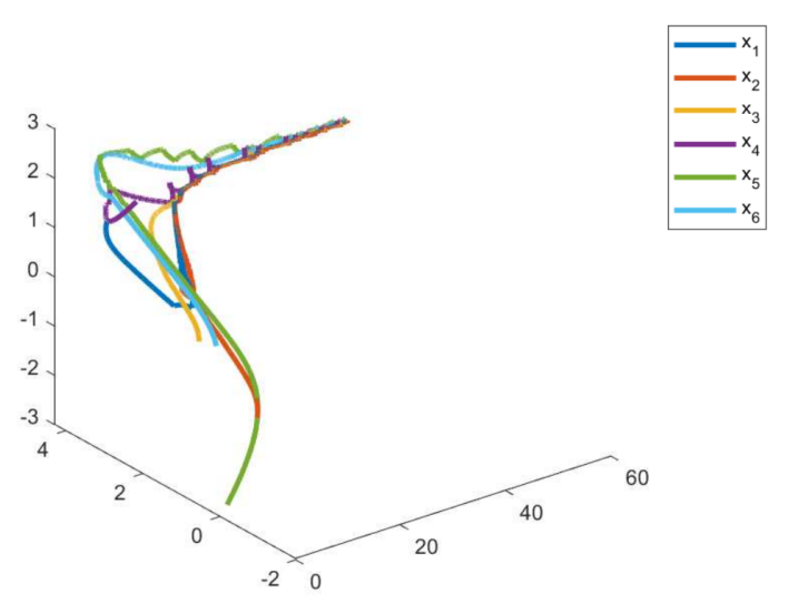
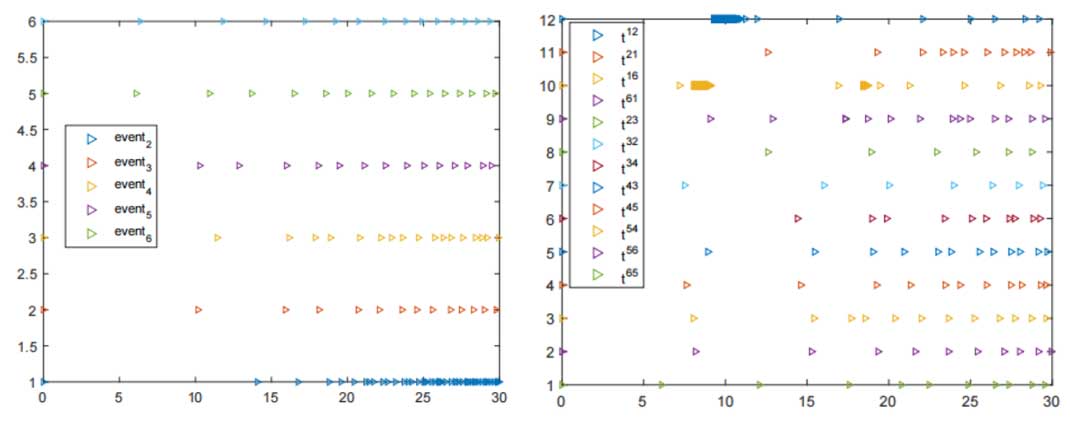
考虑由6个智能体组成的一个多智能体系统,其通信拓扑图是时变的,切换信号满足马尔可夫切换序列,如图1和2所示。仿真结果如图3和4所示。
文章信息
Juan ZHANG, Huaguang ZHANG, Bowen ZHOU & Xiangpeng XIE. Distributed optimal consensus of multiagent systems with Markovian switching topologies: synchronous and asynchronous communications. Sci China Inf Sci, doi: 10.1007/s11432-023-3843-7
研究团队
张娟,张化光,周博文:东北大学信息科学与工程学院
解相朋:南京邮电大学物联网学院
原文:https://mp.weixin.qq.com/s/2AJhJG18INgzamyUGoqQ8A
版权声明:本文内容转自互联网,本文观点仅代表作者本人。本站仅提供信息存储空间服务,所有权归原作者所有。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至1393616908@qq.com 举报,一经查实,本站将立刻删除。